


Sukces w tych zawodach cieszy tym bardziej, że odniosła go nowa drużyna istniejąca dopiero od kilku miesięcy. Większość członków zespołu pierwszy raz wzięła udział w tego typu projekcie.

Jak informuje Dorota Sawicka, rzecznik PB, analog łazika marsjańskiego Argo skonstruował zespół studentów w składzie: inż. Aneta Łukowska, Barbara Kuc, Piotr Tomaszuk, Igor Tylman, Paweł Rółkowski, Adam Buczyłowski, Jakub Czygier, Karol Haraburda, Paweł Straszyński, Kamil Kamieński i Michał Ostaszewski. W pracach wsparli ich również: Paweł Frejda, Damian Łapiński, Łukasz Ornowski, Łukasz Magnuszewski, Maciej Leszczyński oraz Maciej Ołdakowski. Nad całością projektu czuwał dr hab. inż. Kazimierz Dzierżek i mgr inż. Maciej Rećko. Analog łazika marsjańskiego Argo to siódmy już tego typu robot skonstruowany na Wydziale Mechanicznym Politechniki Białostockiej.
Zawody Canadian International Rover Challenge polegają na symulacji misji marsjańskiej – na wykonaniu pojedynczych zadań takich jak: pobieranie próbek gleby i szukanie w nich życia (Prospecting Task); uruchomienie urządzeń kopalnianych poprzez podniesienie z ziemi wtyczki, włożenie jej w gniazdo, wymianę bezpiecznika i przekręcenie zaworu (Equipment Servicing Task); znalezienie rannego astronauty, uszczelnienie jego skafandra i dostarczenie tlenu (Search and Rescue Task) oraz dostarczenie ziemi z kilku wybranych miejsc do głównego zasobnika (Resource Extraction Task). Dużym wyzwaniem było zadanie odbywające się w nocy w kompletnych ciemnościach. Analog łazika marsjańskiego musiał samodzielnie oświetlać sobie drogę i znaleźć astronautę, który nadawał ratunkowy sygnał radiowy. W innym zadaniu roboty musiały zmagać się z bardzo suchą glebą kanadyjskich „badlandów”, z której bardzo ciężko było pobrać próbki. Zadanie dodatkowo utrudniała walka z czasem – w 60 minut należało dostarczyć jak najwięcej wykopanego piachu z różnych miejsc.
Po raz pierwszy konkurs zorganizował zespół University of Saskatchewan Space Design (USST) w lipcu 2017 r. Celem tego przedsięwzięcia było przetestowanie analogów łazików marsjańskich poza laboratoriami, w których powstały. Konkurs stanowi cenne uzupełnienie edukacji każdego, kto interesuje się nauką i technologią. Jest także świetną okazją, aby sprawdzić się w trudnych warunkach i pokazać swoje umiejętności na arenie międzynarodowej.
Budowę łazika marsjańskiego Argo wsparł Prezydent Białegostoku w ramach umowy dotyczącej promocji miasta. Udział w zawodach sfinansowany został dzięki projektowi „Najlepsi z najlepszych! 2.0.” w ramach Programu Operacyjnego Wiedza Edukacja Rozwój współfinansowanego ze środków Europejskiego Funduszu Społecznego.
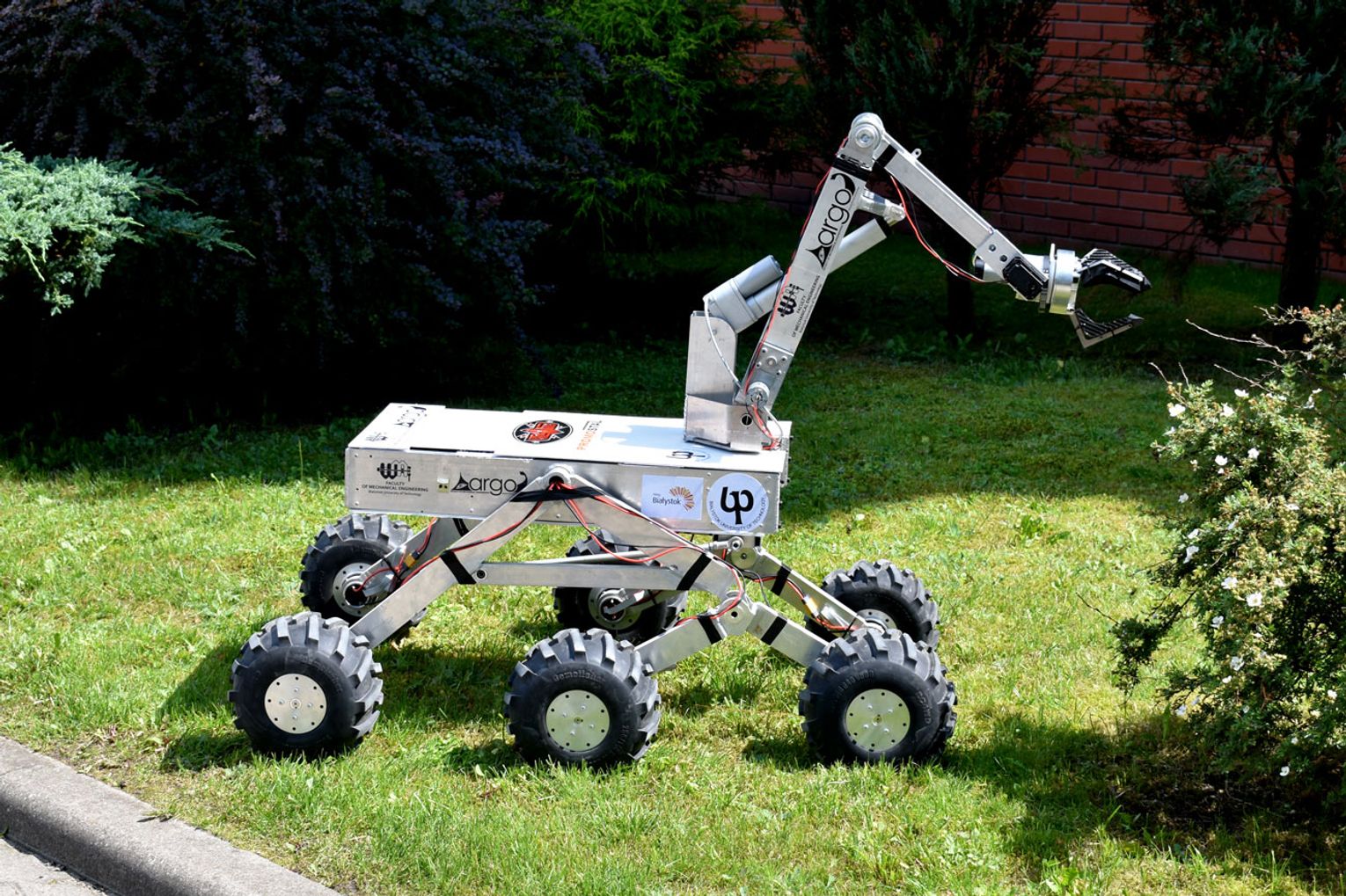
Konstruktorzy ARGO tak charakteryzują swego robota:
- zawieszenie terenowe oparte na mechanizmie rocker-bogie, co umożliwia podniesienie każdego z kół na wysokość 40cm, podczas gdy pozostałe koła dotykają podłoża
- zintegrowane koła wraz z silnikami, kompaktowe proste rozwiązanie, szczelne, chronione przed wpływem środowiska
- lekkie i bardzo wytrzymałe podwozie wykonane z profili aluminiowych
- mechanizm różnicowy pozwalający na niezależne działanie każdego wahacza
- brak dodatkowej amortyzacji i wcześniej wymienione rozwiązania pozwalają na płynny ruch pojazdu oraz zapewniają 3 punkty podparcia
- ramię robota - bardzo stabilne i wytrzymałe, sztywna konstrukcja z profili aluminiowych
- pierwszy człon ramienia/manipulatora napędzany jest precyzyjnym siłownikiem elektrycznym; drugi człon - napęd na paskach zębatych, efektor końcowy wyposażony jest w serwomechanizmy
- 3-palczasty chwytak, zastosowano nasadki adaptacyjne na palce chwytaka wydrukowane w technologii 3D z gumy
- kompaktowa konstrukcja chwytaka, zintegrowany układ pochylania i obrotu
- gimbal do kamery w całości wykonany w druku 3D, również zastosowano druk 3D do elementów takich jak akcesoria do robota - zamykane, szczelne pudełka do badania pobranej gleby
- dodatkowy wymienny efektor końcowy do pobierania próbek gleby
- pokładowa sieć Ethernet
- zintegrowany system wizyjny złożony oparty o serwery video wykorzystujące kamery analogowe i cyfrowe
- aplikacja do sterowania robotem jest czytelna i wygodna dla operatora, została podzielona na sekcje, w których znajdują się informacje m.in. o położeniu robota, trybie w jakim się znajduje, podglądzie z każdej z kamer, odczytach z czujników
- własny protokół komunikacyjny i szereg innych zabezpieczeń
- system rozpoznawania obiektów oparty o mikrokomputer graficzny NVIDIA Jetson TX2
- tryb jazdy autonomicznej
- wykorzystanie stereowizji do znajdowania przeszkód.








![Łomża w niebieskich barwach! Marsz dla autyzmu poruszył miasto - [VIDEO]](https://static2.narew.info/data/articles/sm-16x9-lomza-w-niebieskich-barwach-marsz-dla-autyzmu-poruszyl-miasto-video-1743680268.jpg "Łomża w niebieskich barwach! Marsz dla autyzmu poruszył miasto - [VIDEO]")


Komentarze